Explanation
System Architecture and Design Philosophy
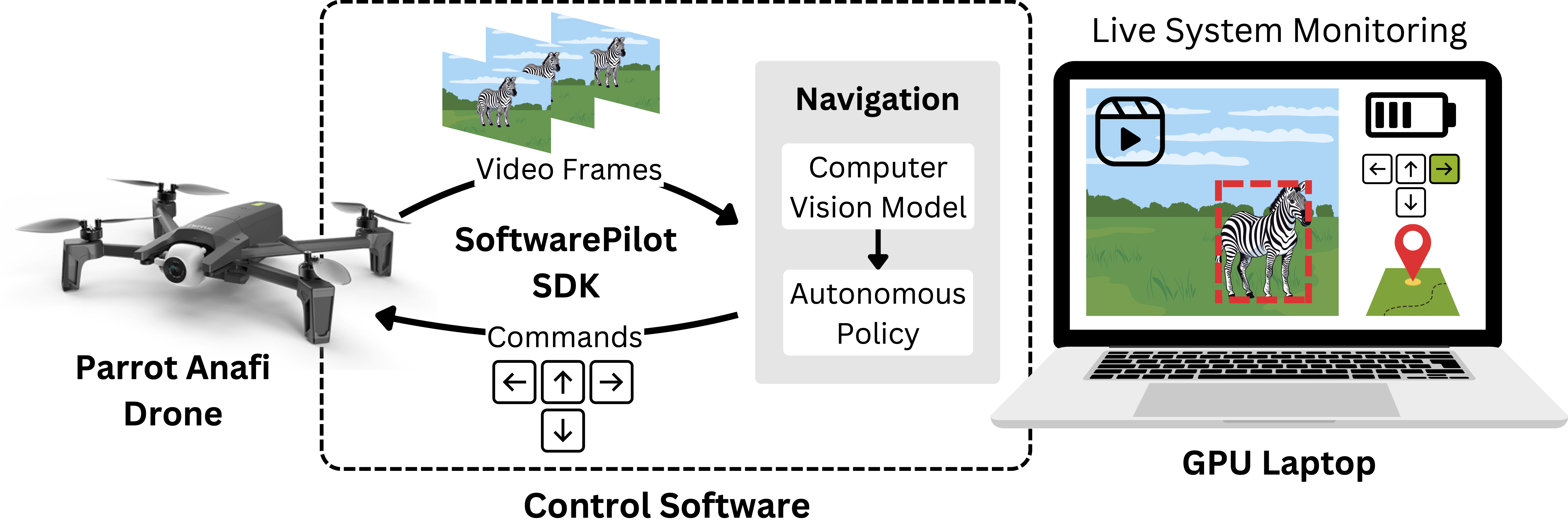
Core Components
The WildWing system consists of three integrated components designed for autonomous animal behavior monitoring:
1. Parrot Anafi Drone Platform The Parrot Anafi was chosen for its balance of affordability, stability, and video quality. Its lightweight design and excellent stabilization make it ideal for wildlife observation where minimal disturbance is crucial.
2. Open-Source Control Software Built on the SoftwarePilot framework, the control software serves as the bridge between computer vision analysis and drone commands. This design pattern separates concerns, allowing researchers to modify tracking algorithms without touching flight control code.
3. GPU-Enabled Ground Station The laptop serves dual purposes: running computationally intensive YOLO models for real-time animal detection and providing a monitoring interface for researchers to oversee mission progress.
Autonomous Navigation Philosophy
The navigation system employs a reactive approach rather than pre-programmed flight paths. This design choice enables:
- Adaptive tracking: The drone responds to animal movement in real-time
- Flexible deployment: No need for extensive pre-mission planning or GPS waypoint programming
- Robust operation: The system handles unexpected animal behavior gracefully
Computer Vision Integration
YOLO (You Only Look Once) models provide the detection backbone because they offer:
- Real-time processing: Fast enough for responsive drone control
- Versatile detection: Can be trained on multiple species with minimal modification
- Resource efficiency: Runs effectively on laptop GPUs
Why This Architecture Works
This distributed approach (drone + ground processing) was chosen over onboard processing because:
- Computational power: Laptop GPUs significantly outperform drone processors
- Upgradability: Easy to improve detection models without hardware changes
- Cost effectiveness: Leverages existing research computing resources
- Real-time monitoring: Researchers maintain situational awareness throughout missions

The system has been successfully deployed across diverse species and habitats, demonstrating its flexibility and effectiveness for behavioral ecology research. The open-source nature encourages community contributions and adaptations for specific research needs.